





Volvo will develop and test a complete hybrid powertrain for LH (35/40ton) application. The powertrain consists of a high efficient engine concept, with a novel combustion engine adopted for hybrid application and right powered in interaction with an electric motor. In order to reach 50% efficiency, the hybrid engine will utilize narrow range operation area, high peak cylinder pressure (>240bar), advanced combustion system, higher boost pressure and reduced losses. The emissions will be fulfilled by high efficient precise EGR control and novel EATS tailored for hybrid application. In order to fully benefit from electrification of the powertrain a new model based predictive control strategy for energy and power management in hybrid application will be developed and implemented.
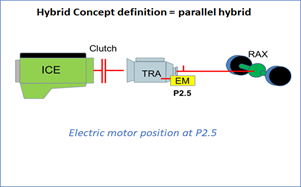
Figure 1: Layout of the hybrid powertrain concept with internal combustion engine (ICE), transmission (TRA), electric motor at position 2.5 (EM P2.5) and the rear axle (RAX)
The concept is a parallel hybrid with an internal combustion motor (ICE), electric motor (EM), transmission, battery and electronic converters. The position of the EM is P2.5, which means that the EM is connected semi integrated with the transmission. This position has good potential for better performance, for example apply higher efficient electric motors. A predictive energy management strategy (EMStr) is needed to achieve the optimal fuel consumption however. It includes planning and operation of the energy sources and consumers within a vehicle.
The Volvo approach relies on three stages targeting the improvement of the control strategy:
(a) direct optimisation of the control of the main components (engine, exhaust after-treatment, transmission, waste heat recovery, e-drive) to maximize their performances,
(b) global powertrain energy manager to coordinate the different energy sources and optimize their use depending on the current driving situation,
(c) providing a more comprehensive understanding of the mission (eHorizon, mission-based learning) such that the different energy sources can be planned and optimized on a long term. Based on the IMPERIUM Projects, whose principle objective was to achieve a 20% fuel consumption (diesel and urea) reduction, with consequent CO2 reductions compared to a model year 2014 vehicle. This led to the development of a new means of predictive and comprehensive powertrain control which maximises the full potential of the individual systems for each vehicle application and mission. The newly developed components have been first validated on various platforms such as Hardware in the Loop (HiL), engine testbed and demonstrator trucks, including an IVECO Stralis powered by FPT Industrial, and then further integrated into this environment for evaluation of their impact on the complete system.
Hybridization of a truck introduces an additional energy source and power converter to the drivetrain and therefore adds a further degree of freedom within the EMStr. The vast majority of hybrid vehicles are hybrid electric vehicles (HEV). For a given topology and given energy capacity and power capability of the electric system, the control problem is extended by starting/stopping the engine and choosing the power split between engine and electric machine during driving. The control decision can also profit from predictive information. In a conventional truck the upper speed limit can be reached quite quickly on longer downhill stretches by converting potential into kinetic energy. The rest of the potential energy has to be wasted by braking. A hybrid vehicle makes use of that energy by regenerative braking. Due to the power limit of the electric system it is often wise to start the recuperating from the beginning of the downhill event. Thus, the potential energy is converted in kinetic energy and electrochemical energy simultaneously[1]. For more information visit IMPERIUM.
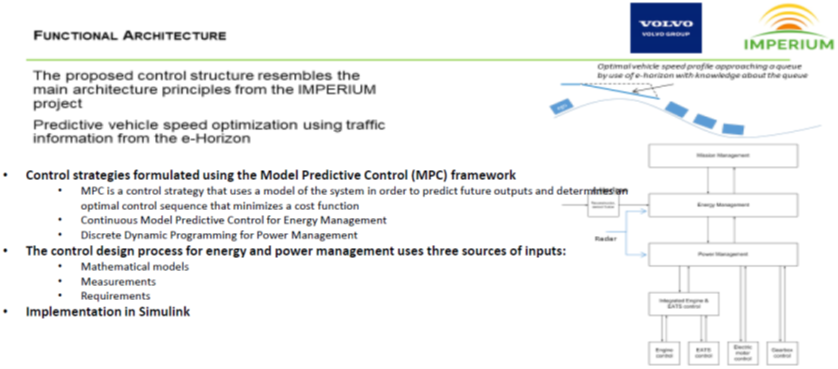
Figure 2: Functional architecture within IMPERIUM
The requirement and performance for the hybrid powertrain is to be on par or better than the baseline conventional powertrain. Figure 3 is showing torque curves for different devices. Output torque is a function of the engine speed, which gives the power output.
The black curve is the reference, a conventional diesel engine torque curve. Then in LONGRUN a new hybrid powertrain (dotted line), a new diesel engine (green line) and a new electric motor (purple line) will be developed. The new hybrid torque curve is the output of the combination, interaction, of the new combustion engine and electric motor torque curves.
The new hybrid powertrain shall fulfil , in duty cycle, the demanded power in terms of vehicle speed and brake, and obtain improved energy efficiency of target above 10% fuel saving and at the same time reduce pollution emissions more than 30%. Furthermore, zero emission driving operation (full electric) should be possible for the vehicle, the specific requirement for this zero emission driving will be further discussed in LONGRUN. Development will also be towards more improved performance or additional function opportunity due to the hybrid concept and the new control strategies for torque split and brake blending.
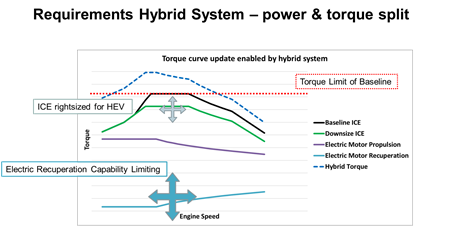
Figure 3: The graphs shows torque curves for different devices, and the new hybrid torque (blue dotted line) as a combination of the of new ICE (green line) and new electric motor (purple line).
The objectives of Volvo during LONGRUN are:
- >10% energy saving vs. reference vehicle MY2018 demonstrated in a HD hybrid powertrain test bench in LH duty cycle application;
- Improved energy and power management by develop and implement model based predictive control system for hybrid powertrain;
- Improved combustion engine efficiency, target 50% peak brake thermal efficiency;
- Achieve 30% reduction of NOx, CO, HC system out compared to Euro VI regulation;
- Fulfil PN reduction of 30% including particles > 10 nm in “In Service Conformity” (ISC) cycles;
- Develop a new electric motor for HD application with improved efficiency
Background
The IMPERIUM concept relied on control strategy improvements around the following four technical clusters:
(a) predictive management for a global powertrain and vehicle supervisor,
(b) engine control,
(c) waste heat recovery, and
(d) hybridization.
For all of these clusters, two approaches were proposed. The first improvement approach targeted existing control strategies. This mostly relied on migration from direct control strategies to model-based control strategies as well as on integration of existing strategies. The model-based control strategy approach relied on a mathematical model of the physics of parts of the system (e.g. combustion), which was running in real time on the computing platform and was able to provide more accurate information of the current state of the system. Furthermore, a mathematical (sub) system description was the base to use predictive control strategies. The integration of different control enabled tighter synchronization between the (highly dependent) systems and, therefore, improved performance.
[1] https://www.imperium-project.eu/fileadmin/user_upload/TRA2018_10380_IMPERIUM.pdf